本文综合了网上部分讲解资料,旨在归纳并梳理Faster R-CNN算法相关原理,方便日后查阅复习
一、目标检测与Faster R-CNN
目标检测与图像分类同属于计算机视觉(CV)范畴,但前者较后者在难度和复杂度层面又上了一个台阶,因为目标检测不光需要解决“是什么”(分类)的问题,还需要解决“在哪儿”(定位)的问题。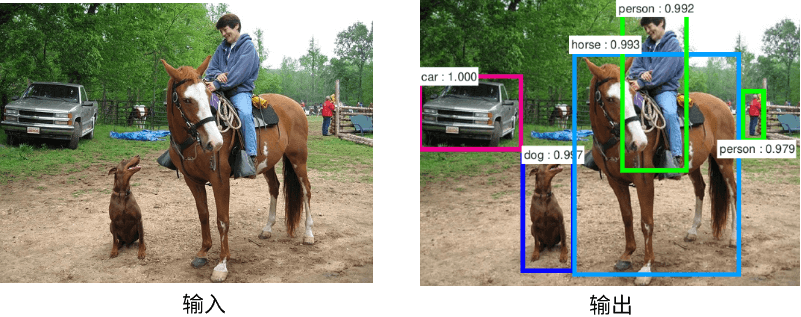
1.目标检测算法分类
基于深度学习的目标检测算法,主要分为两种:one-stage算法和two-stage算法。one-stage(一阶段)算法是在获取的图像特征上直接做分类+回归(定位),而two-stage(两阶段)算法则多了一步:获取图像特征,生成Region Proposal(候选区),再进行分类+回归(定位)
2.Faster R-CNN介绍
Faster R-CNN是由Ross B.Girshick在2016年提出的,做为two-stage算法的经典之作,它在前两作(R-CNN和Fast-RCNN)的基础上,又有了很大改进,最终在VOC2007测试集测试mAP达到73.2%,目标检测速度可达5帧/秒(但依然无法实现视频实时检测,所以后来有了one-stage著名的YOLO系列)。虽然提出的较早,但它至今仍是许多目标检测算法的基础,所以对其原理的学习和掌握有助于更好的了解后续模型和算法。
二、Faster R-CNN原理详解
1.网络结构
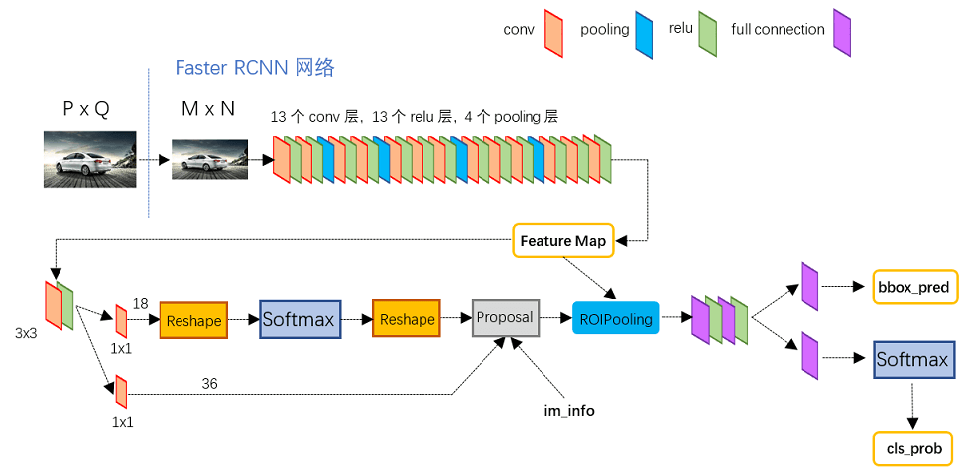
如上图,Faster R-CNN网络主要由五部分组成:
- Input(输入): 对于输入的图像,首先需要缩放至固定大小MxN,然后再将MxN图像送入网络。虽然Faster R-CNN本身并不限制输入图像的大小,但是在实际训练过程中,太大的图像容易撑爆内存
- Backbone(主干网络):也有叫它Extractor的。主要为Conv layers(卷积层),来提取图像特征(feature maps),用于后续的RPN层和全连接层。此处可以使用ZF/vgg/Resnet/MobileNet等。以vgg16为例,包含了13个conv层+13个relu层+4个pooling层
- RPN(Region Proposal Network):最大的创新点,解决了前两代算法使用ss(selective search)生成region proposals(候选区)太慢的问题。通过softmax判断anchors(下文会讲)属于positive或者negative,再利用bounding box regression修正anchors获得精确的proposals(第一次修正,后面还有一次),这里输出的proposals又称为RoIs(Region of Interests)
- ROI Pooling:输入的是Backbone给到的feature maps和RPN生成的RoIs,通过RoIs在feature map上进行截取,获得proposal feature maps,送入后续全连接层,用于最终的分类和第二次的bounding box(bbox,检测框)regression来修正检测框
- RoI Head:全连接层,有些书里将这部分称之为检测头,主要是利用proposal feature maps计算bbox的类别,同时再次bounding box regression获得检测框最终的精确位置。
下面分别详细介绍这五部分
2.Input
主要操作如下:
- 对图片进行缩放,相应的bounding boxes也要进行同等尺度的缩放(不然对不上)
- 归一化处理
会返还4个值供后续训练使用:
- images : 3×H×W ,BGR三通道,宽W,高H
- bboxes: 4×K , K个bounding boxes,包含每个bounding box的左上角和右下角的座标,形如(Y_min,X_min, Y_max,X_max)
- labels:K, 对应K个bounding boxes的label(对于VOC取值范围为[0-19])
- scale: 缩放的倍数, 原图H’ ×W’被resize到了HxW(scale=H/H’ )
3.Backbone
这里面其实包含了conv,pooling,relu三种层。以vgg16为例,共有13个conv层,13个relu层,4个pooling层,值得注意的是:
- 所有的conv层都是:kernel_size=3,pad=1(即填充一圈0),stride=1。即经过conv层后,输出尺寸不变,依旧为MxN
- 所有的pooling层都是:kernel_size=2,pad=0,stride=2。即经过pooling层后,输出尺寸变为原来的1/2
以vgg16为例,因为有4个pooling层,所以一个MxN大小的矩阵经过Backbone后变为(M/16)x(N/16),即下采样16倍,这个比列(16)很重要,后续feature map映射回原图时需要通过它来计算
4.RPN
RPN用于提供候选区域,它其实也是一个神经网络,有自己的loss function,以及相关概念,它实现了对Region Proposal的初步二分类和定位
(1)Anchor Box
在RPN中,作者提出了Anchor的概念。Anchor是人为预定义的边框(先验框),也就是一组预设的边框。在训练时,以真实的边框位置相对于预设边框的偏移来构建训练样本。这就相当于,预设边框先大致在可能的位置“框“出来目标,然后再在这些预设边框的基础上进行调整。
在一幅图像中,要检测的目标可能出现在图像的任意位置,并且目标可能是任意的大小和任意形状,为了尽可能的框出目标可能出现的位置,预定义边框通常有上千个甚至更多
Anchor Box的生成是以Backbone最后生成的feature Map上的点为中心的(可以映射回原图),以vgg16为例,使用vgg对输入的图像下采样了16倍,也就是Feature Map上的一个点对应于输入图像上的一个16×16的正方形区域(感受野)。根据预定义的Anchor,Feature Map上的一点为中心,就可以在原图上生成9种不同形状不同大小的边框,如下图: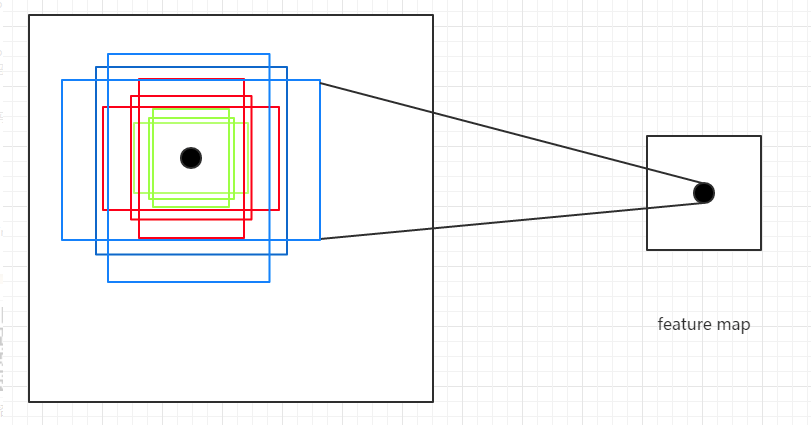
作者论文中用到的anchor有三种尺寸(scale)和三种比例(ratio),如下图所示,三种尺寸分别是小(蓝128)中(红256)大(绿512),三个比例分别是1:1,1:2,2:1。3×3的组合总共有9种anchor。
例如,一张800x600的原始图片,经过vgg下采样后(生成特征矩阵)16倍大小,大小变为50*38,每个点设置9个anchor,则总数为:
1 | ceil(800/16) * cei1(600/16) * 9 = 50*38*9 = 17100 |
本质上,scale是用来表示目标的大小,ratio是用来表示目标的形状
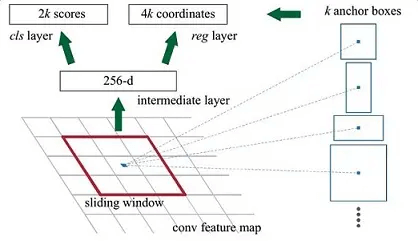
(2)网络结构
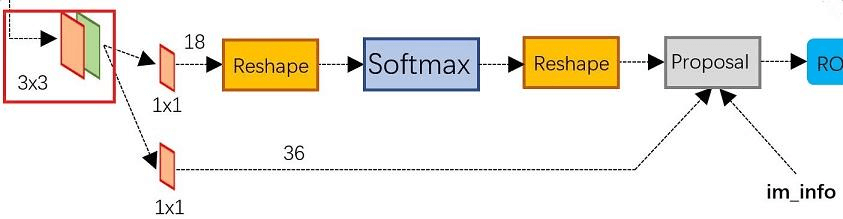
结合上面两张图,可以看到RPN网络实际分为2条线,上面一条通过softmax分类anchors获得positive和negative分类,下面一条用于计算对于anchors的bounding box regression偏移量,以获得精确的proposal。
(3)流程步骤
a.做3x3卷积
对于Backbone输出的feature map,通道数为256(作者使用的ZF为256,如果是vgg则为512),RPN会先做一个3x3的卷积,此时输出通道数不变
b.设置anchor box
对于feature map上的每个点,计算出k(默认k=9)个anchor boxes(注意和proposal的差异)。
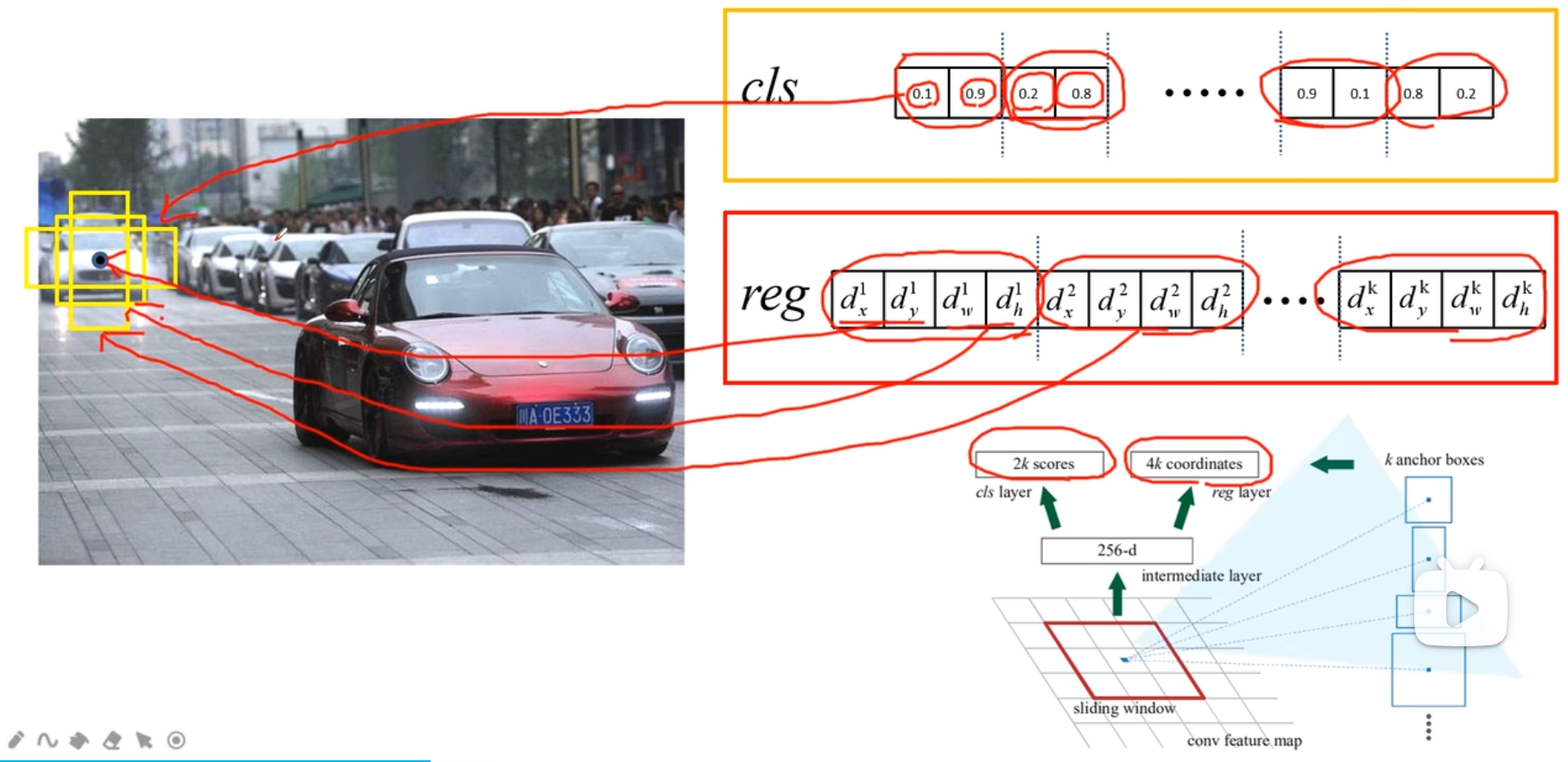
c.对anchor box分类
将这些anchor boxes输入到一个1*1的卷积层(如上图“RPN网络”的上路分支),获得一个特征向量,输出通道数为2k(默认k=9的话,就是2x9=18),至于为什么要乘以2,是因为后面需要用来区分每个anchor box是属于positive(前景,包含目标),还是negative(背景,不包含目标)。然后做一个softmax(前后的2个reshape是为了便于softmax分类),这里也可以使用sigmoid来实现。
那RPN是如何对这些anchor boxes区分是positive还是negative的呢?论文中规定,符合下面条件之一的即为positive:
- 与任意GT(Ground Truth)区域的IoU大于0.7
- 与GT区域的IoU最大的anchor(也许不到0.7)
而与任意GT的区域的IoU都小于0.3的anchor设为negative,对于既不是positive也不是negative的anchor以及跨越图像边界的anchor就直接舍弃掉。
d.获取bounding box coordinates
在RPN网络图的下路,通过1x1的卷积,生成了一个包含4k(默认k=9的话,就是4x9=36)个coordinates(dx, dy, dw, dh, 相对于真实物体框的偏移)的特征向量,并结合上路分类获取的2k个score(如下图),一起进入到最后的Proposal Layer
e.Proposal Layer
Proposal Layer负责综合所有coordinates(dx, dy, dw, dh)变换量和positive anchors,计算出精准的proposal,送入后续RoI Pooling Layer
该层有3个输入:
- positive or negative anchors分类结果(score)
- 上述anchor对应的bbox reg的coordinates(dx, dy, dw, dh)变换量
- im_info:对于原始图像PxQ,在Input时做了缩放,reshape到了MxN尺寸,则im_info=[M, N, scale_factor]
- feature_stride:Backbone中下采样的倍数。以vgg16为例,4个pooling层,每经过一个pooling,图像尺寸变为原来的1/2,所以feature_stride=16
该层的流程如下图 (摘自《深度学习之PyTorch物体检测实战》):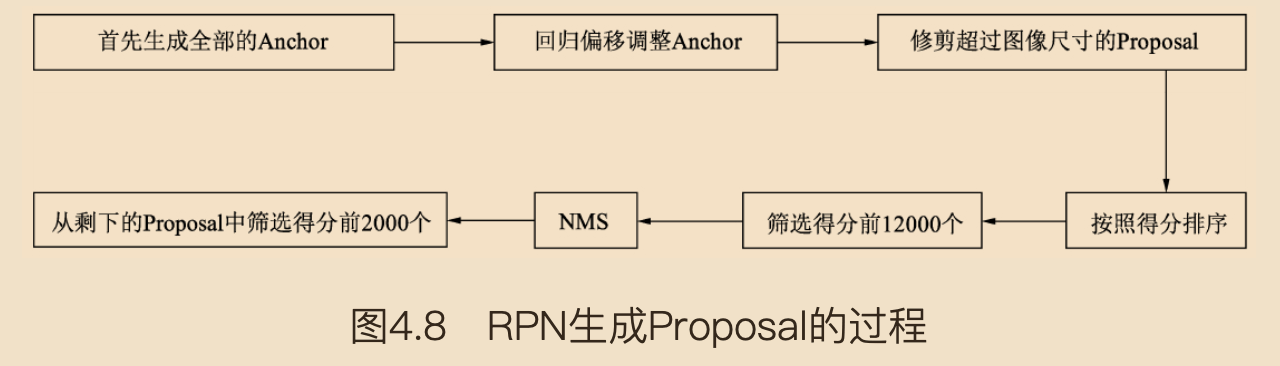
首先生成大小固定的全部Anchors,然后将网络中得到的回归偏移作用到Anchor上使Anchor更加贴近于真值,并修剪超出图像尺寸的Proposal,得到最初的RoIs(region of interests)。在这之后,按照分类网络输出的得分对RoIs排序,保留前12000个得分高的RoIs。由于一个物体可能会有多个RoIs重叠对应,因此再应用非极大值抑制(NMS)将重叠的框去掉,最后在剩余的RoIs中再次根据RPN的预测得分选择前2000个,作为最终的RoIsl,输出到下一个阶段。
其中,对于anchor box的回归(定位)偏移调整又是如何实现的呢?这里偷个懒,直接贴一篇大神的解释:Fast R-CNN中的边框回归,讲的很详细
那NMS去掉重叠框又是怎么操作的呢?具体过程如下图: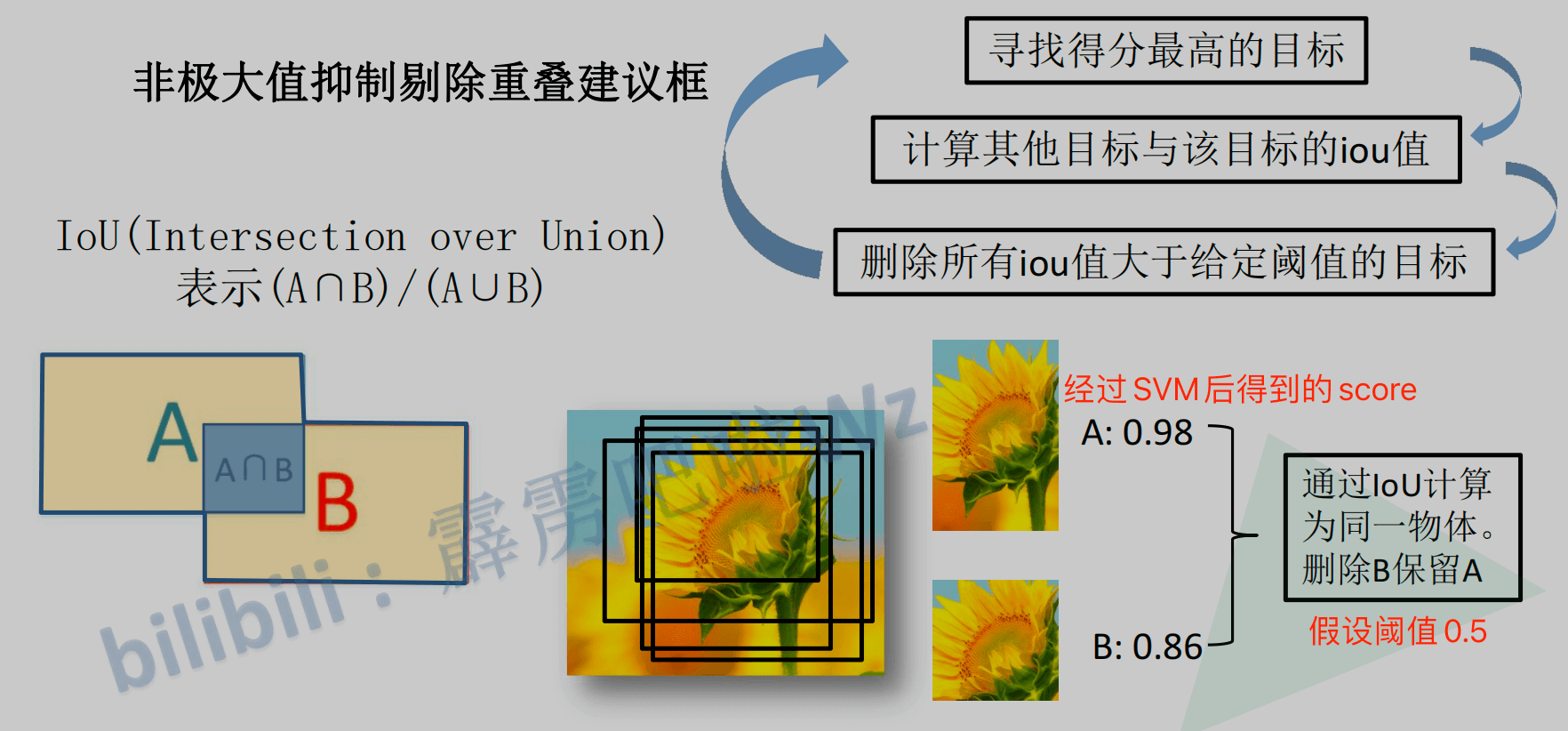
假设有A和B两个框,A的score是0.98,B的score是0.86,计算AB的IoU,如果IoU大于阈值(比如0.5),则认为AB是同一个物体,然后删除score较小的B,以此循环来去掉重叠的框
RPN网络结构就介绍到这里,总结起来就是:
生成anchors -> softmax分类器提取positvie anchors -> bbox reg回归修正positive anchors -> Proposal Layer生成RoIs
5.RoI Pooling
该部分负责收集RoIs,并在原始的feature map上截取出proposal feature maps,送入后续网络。从上图中可以看到Rol pooling层有2个输入:
- 原始的feature maps
- RPN输出的RoIs
(1)为何需要RoI Pooling
因为RoIs是从anchor box修正来的,所以大小各不相同,而后面的FC(全连接层)又需要统一的输入尺寸,所以这里使用pooling将RoIs大小统一
(2)RoI Pooling运算过程
这里有3个参数:pooled_w、pooled_h和spatial_scale
- 首先使用spatial_scale参数(16)将每个RoI映射回(M/16)x(N/16)大小的feature map尺度;
- 再将每个RoI对应的feature map区域水平分为 pool_w*pool_h 的网格;
- 对网格的每一份都进行max pooling处理
这样处理后,即使大小不同的RoI,输出结果都是 pool_w*pool_h 固定大小,实现了固定长度输出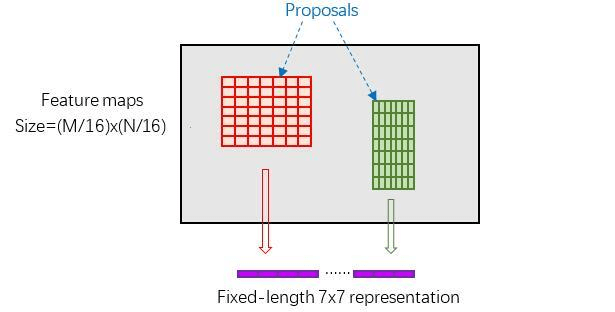
RoI Pooling是一种特殊的Pooling操作,假设给定一张图片的feature map(512×H/16×W/16) ,和128个候选区域的座标(128×4),RoI Pooling将这些区域统一下采样到(512×7×7),就得到了128×512×7×7的向量。可以看成是一个batch-size=128,通道数为512,7×7的feature map
(3)为什么要pooling成7×7的尺度?
是为了能够共享权重。看下vgg网络结构图(如下),Faster R-CNN除了用到vgg前几层的卷积之外,最后的全连接层也可以继续利用。当所有的RoIs都被pooling成(512×7×7)的feature map后,将它reshape 成一个一维的向量,就可以利用vgg16预训练的权重,初始化前两层全连接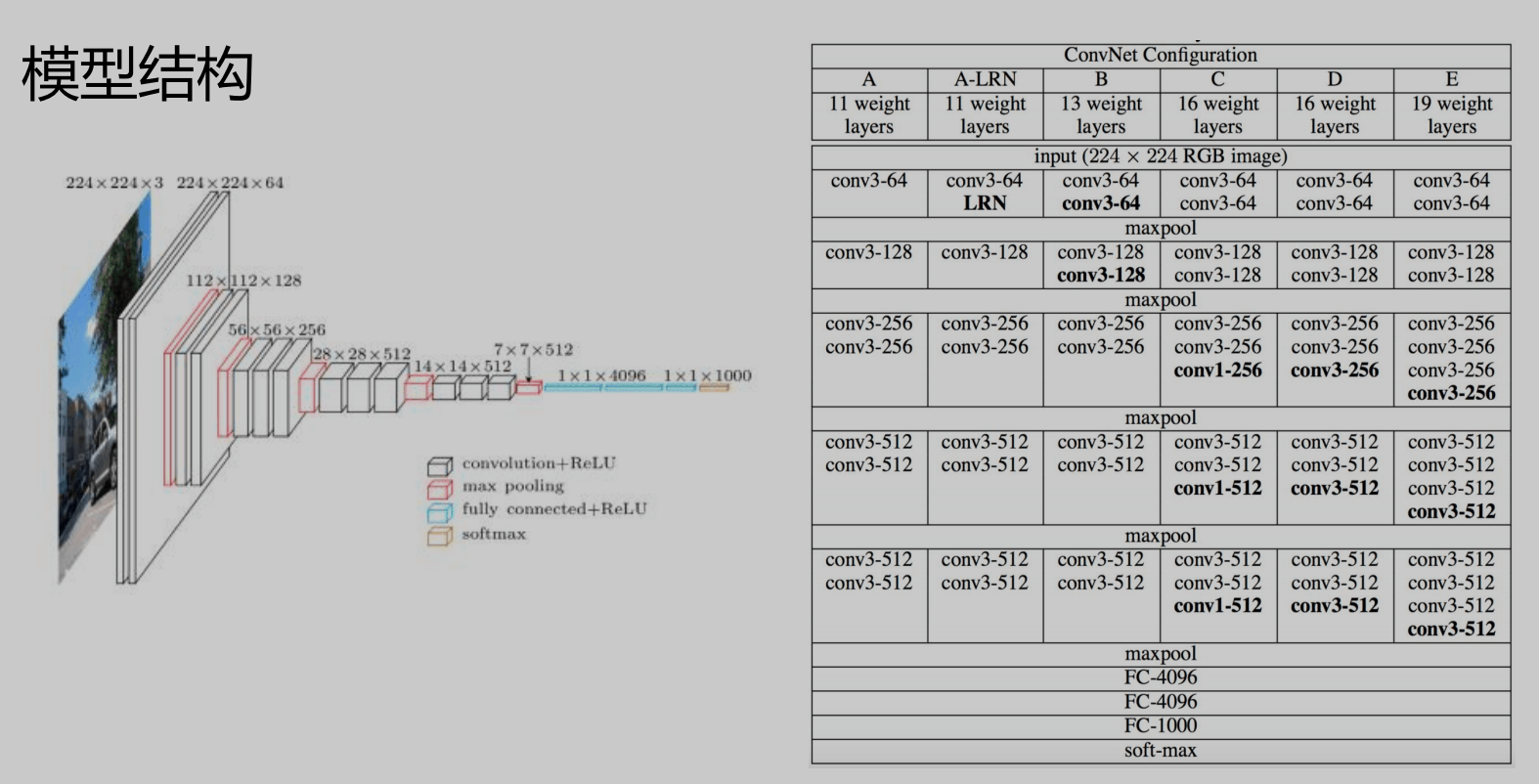
6.RoI Head
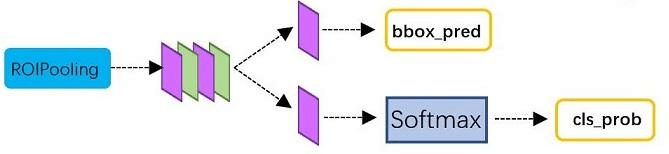
该部分网络结构如上图,利用已经获得的proposal feature maps,通过全连接层与softmax计算每个RoI具体属于哪个类别(人、车、电视等),输出cls_prob概率向量(这里有21个值,即20个类别+1个背景);同时再次利用bounding box regression获得每个proposal的位置偏移量bbox_pred(这里有84个值,21个类 x 每个类有4个位置参数),用于回归更加精确的目标检测框
7.损失函数
Faster R-CNN的loss由两部分组成:RPN的loss + RoI Head中的loss构成,而这两部分中,每一个部分的loss又都是由分类loss + 回归loss组成。以RPN为例,如下图: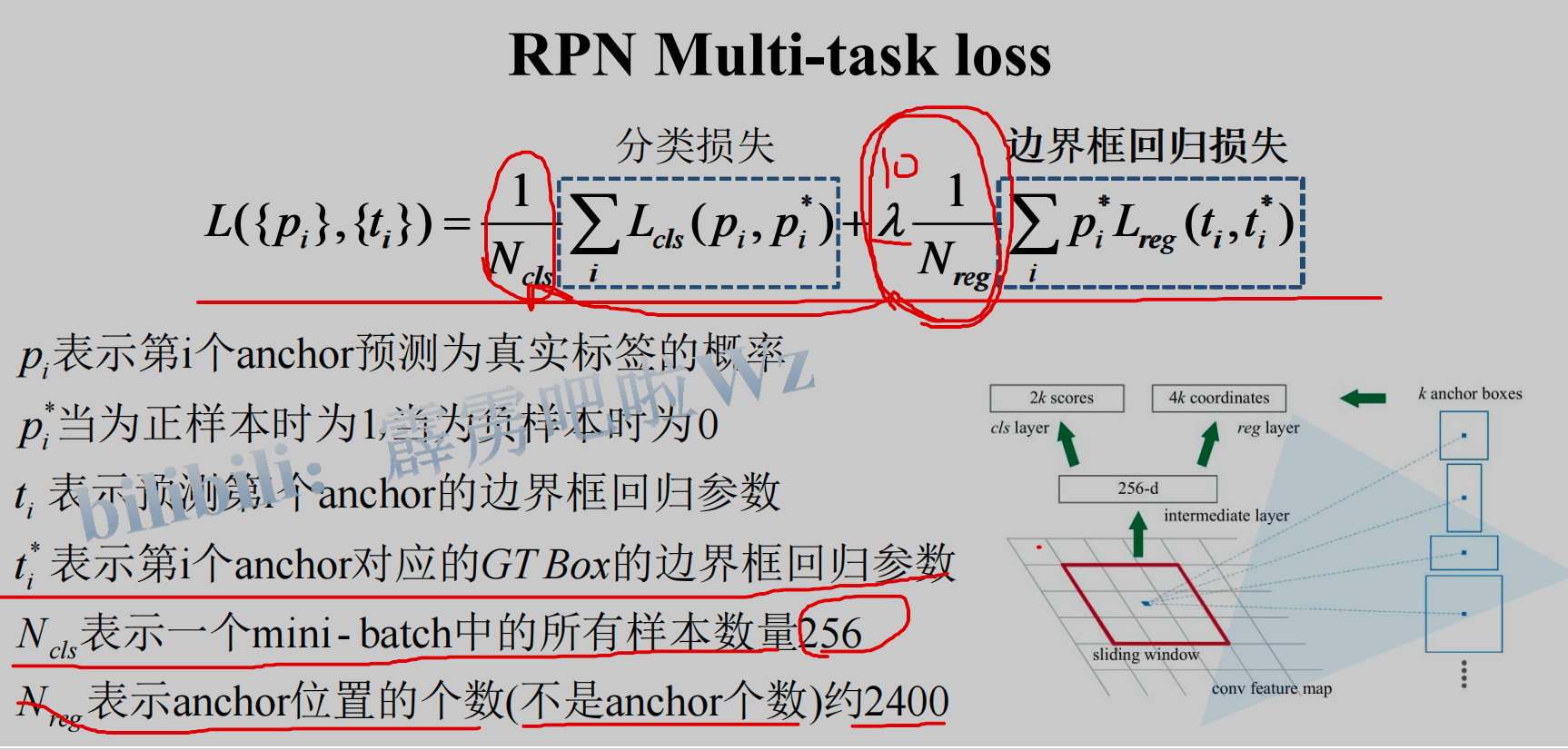
其中分类损失部分,使用多分类交叉熵,如下图: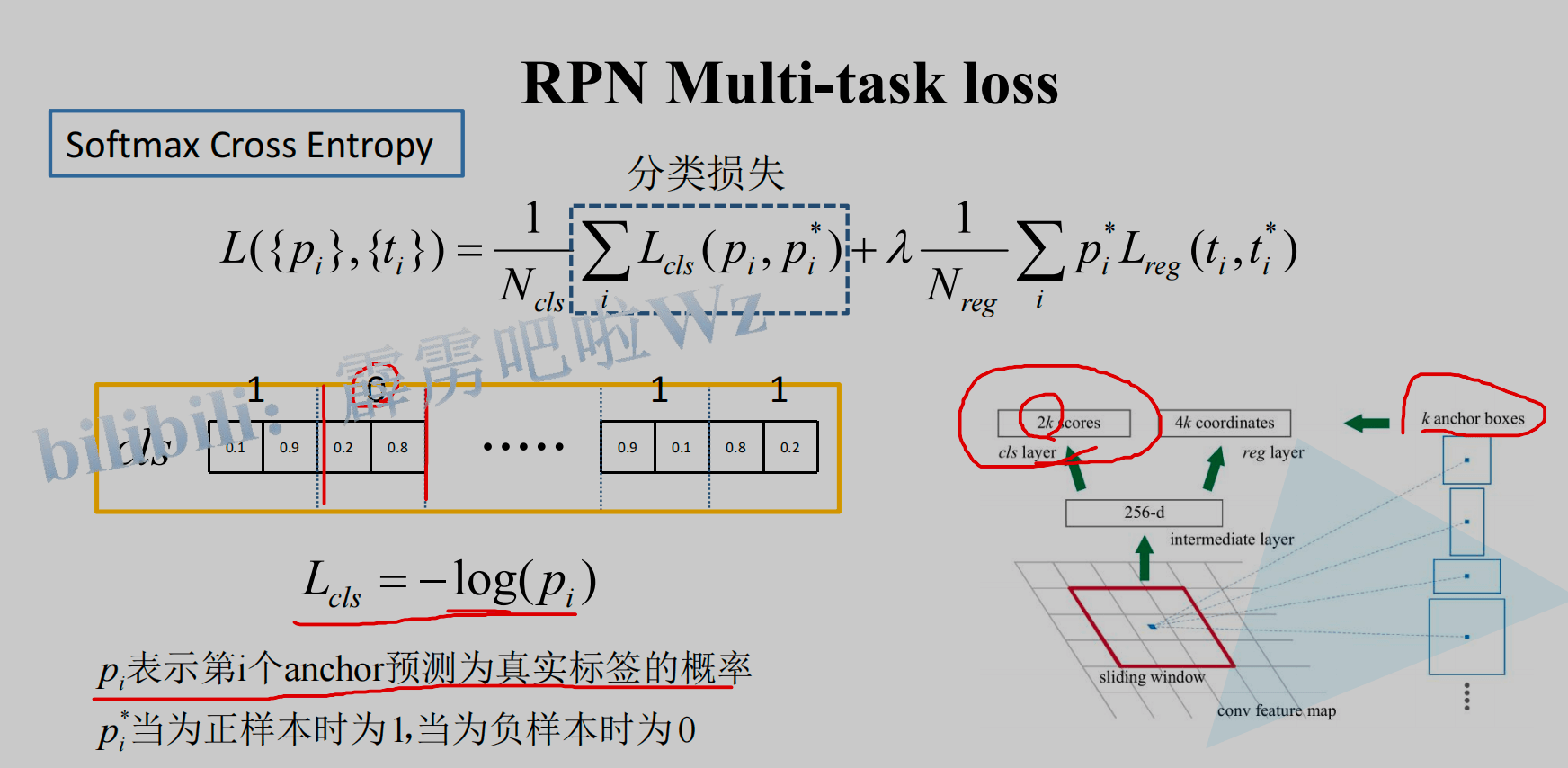
也可以使用sigmoid实现,即二分类交叉熵,如下图: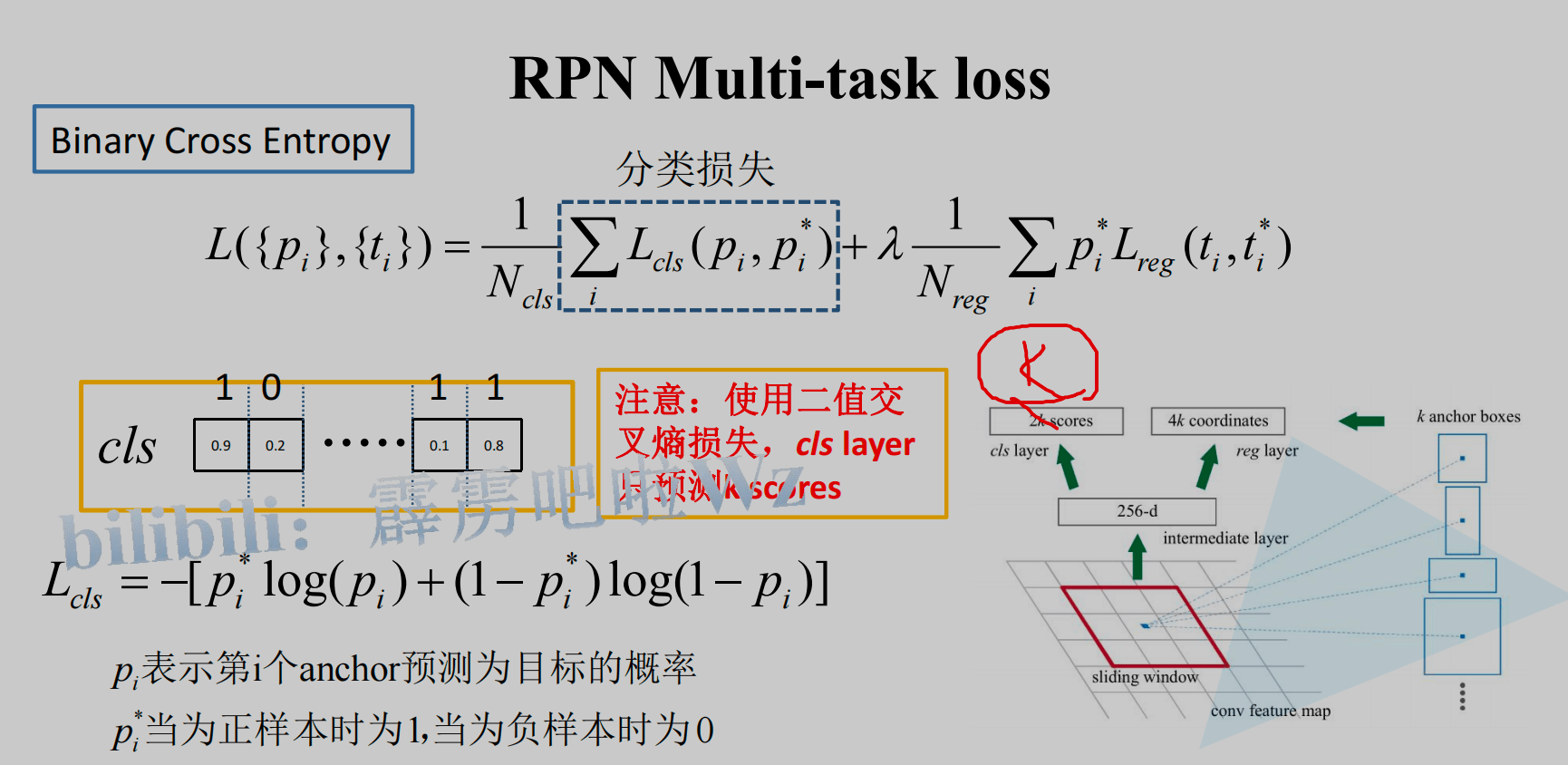
回归损失部分,使用smooth L1函数,如下图: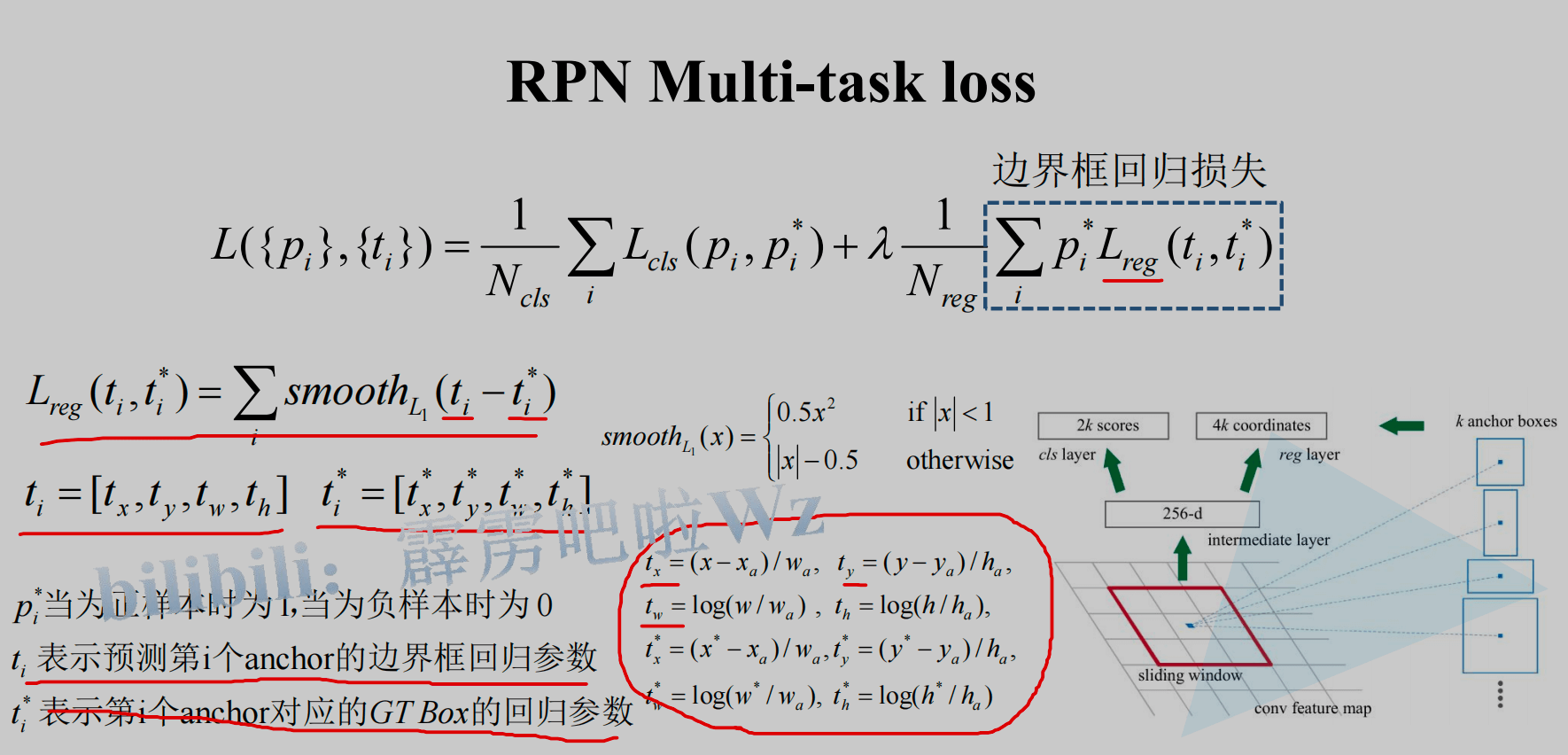
关于smooth L1可以参考这篇文章:回归损失函数1:L1 loss, L2 loss以及Smooth L1 Loss的对比
三、QA
1.bbox、anchor box、RoI、region proposal的区别?
- bbox:全称是bounding box,边界框。其中GT(Ground Truth) Bounding Box是每一张图中人工标注的框的位置。一张图中有几个目标,就有几个框。Faster R-CNN的预测结果也可以叫bounding box,不过一般叫 Predict Bounding Box
- anchor box: 中文有翻译成锚框、先验框的。是人为选定的具有一定尺度、比例的框。一个feature map的锚框的数目可以有上万个(比如 20000)
- RoI: region of interest,候选框、候选区域。在RPN阶段,先穷举生成千上万个anchor,然后利用Ground Truth Bounding Boxes,训练这些anchor,而后从anchor中找出一定数目的候选区域(RoIs)。RoIs在下一阶段用来训练RoIHead,最后生成Predict Bounding Boxes
- region proposal:候选区域,简称proposal,个人认为和RoI是一个概念,只不过通过RPN生成的proposal,又起了一个新名字叫RoI
2.为什么需要anchor box,而不是直接去预测位置?
如果没有Anchor,做物体检测需要直接预测每个框的坐标,由于框的坐标变化幅度大,使网络很难收敛与准确预测,而Anchor相当于提供了一个先验的阶梯,使得模型去预测Anchor的偏移量,即可更好地接近真实物体。
实际上,Anchor是我们想要预测属性的先验参考值,并不局限于矩形框。如果需要,我们也可以增加其他类型的先验,如多边形框、角度和速度等。
3.Faster R-CNN中一共有几个loss?
有4个,如下:
- RPN分类损失:anchor是否为前景(二分类)
- RPN位置回归损失:anchor位置微调
- RoI分类损失:RoI所属类别(21分类,多了一个类作为背景)
- RoI位置回归损失:继续对RoI位置微调
四个损失相加作为最后的损失,反向传播,更新参数
参考文章: